Точная координация в тесном пространстве: ученые разработали новейший алгоритм для медицинских роборук
Российские ученые представили универсальный алгоритм для координации движений манипуляторов в медицинских роботических системах для исключения столкновений в ограниченном пространстве. Алгоритм анализирует рабочую зону, определяет ограничения, связанные с совместной работой внутри системы, адаптирует траекторию и оптимизирует движения для увеличения эффективности.
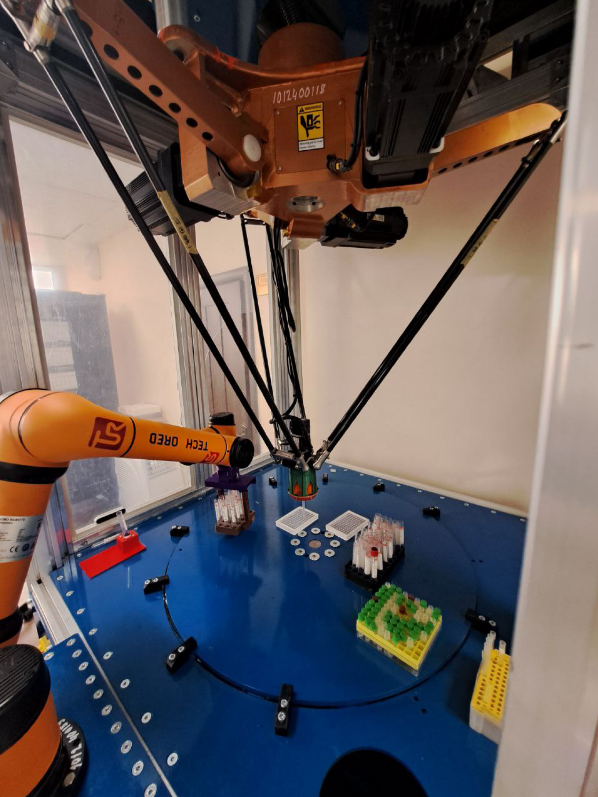
Экспериментальная установка
В медицинских лабораториях для повышения производительности используются роботические системы, объединяющие несколько манипуляторов, которые одновременно совершают различные операции с несколькими пробирками. Специалистам нужно заранее определить, какие операции – последовательные или параллельные – закрепляются за каждым устройством, и затем запустить работу роборук с разной конструкцией – звеньями, приводными механизмами, программным управлением – так, чтобы они не сталкивались между собой в ограниченном пространстве.
Существующие алгоритмы робототехнических систем преимущественно выполняют координационную задачу через датчики, работающие в реальном времени. Ученые из Старооскольского технологического института им. А.А. Угарова (филиала) Национального исследовательского технологического университета (СТИ НИТУ МИСИС), Федерального исследовательского центра «Информатика и управление» Российской академии наук (ФИЦ ИУ РАН) и Белгородского государственного технологического университета им. В.Г. Шухова предложили методику, по которой можно заранее рассчитывать зоны и траектории, чтобы автоматизированные комплексы планировали действия без лишних остановок, перенастроек и столкновений.

«Мы разработали специальные алгоритмы, которые позволяют коллаборативным роботам точно двигаться в ограниченном пространстве. Эти программы заранее рассчитывают, где и как каждый манипулятор должен двигаться, чтобы выполнить свою задачу наиболее эффективно. Внимание мы заострили на построении “зон безопасной работы” – невидимых границ в пространстве, внутри которых нет риска столкновений», – говорит кандидат технических наук Сергей Халапян, доцент кафедры автоматизированных и информационных систем управления СТИ НИТУ МИСИС.
С помощью компьютерных моделей исследователи рассчитали, как именно могут безопасно двигаться два манипулятора: один дозирует жидкость, другой подает пробирки. В расчетах учитывали все элементы окружения. Ошибки при движении были меньше 1 мм по горизонтали и не превышали 0,2 мм по вертикали. С подробными результатами исследования можно ознакомиться в научном журнале Machines (Q2).

«Наши алгоритмы подходят для разных типов манипуляторов. На этапе моделирования мы рассчитали рабочие области и безопасные зоны движения. Также мы протестировали систему, которая автоматически меняет точку встречи роботов при аликвотировании биоматериалов в зависимости от контекста окружения и их индивидуальной нагрузки», – делится научный сотрудник кафедры автоматизированных и информационных систем управления СТИ НИТУ МИСИС Владислав Воробьёв.
Ученые также реализовали систему автоматического смещения точки взаимодействия в зависимости от загрузки каждого манипулятора, что позволяет сократить общее время выполнения цикла.
Университет науки и технологий МИСИС – ведущий вуз в области создания, внедрения и применения новых технологий и материалов. Первым в России получил статус «Национальный исследовательский технологический университет». Входит в топ-5 лучших вузов страны по версии Round University Rankings и в топ-10 рейтингов Times High Education и Interfax. В состав университета входит девять институтов, шесть филиалов – четыре в России и два за рубежом; 48 исследовательских лабораторий и инжиниринговых центров. Основные направления: создание инновационных материалов для микроэлектроники, космоса, ядерной и солнечной энергетики и др.; металлургия; аддитивное производство; горное дело; биоинженерия; ИТ и машинное обучение; квантовые технологии и коммуникации; инжиниринг; промышленный дизайн; технологическое искусство; экономика и инноватика. Университет занимает лидерские позиции в программе Минобрнауки России «Приоритет – 2030» и федеральном проекте «Передовые инженерные школы». Является участником пилотного проекта по совершенствованию системы высшего образования.